About
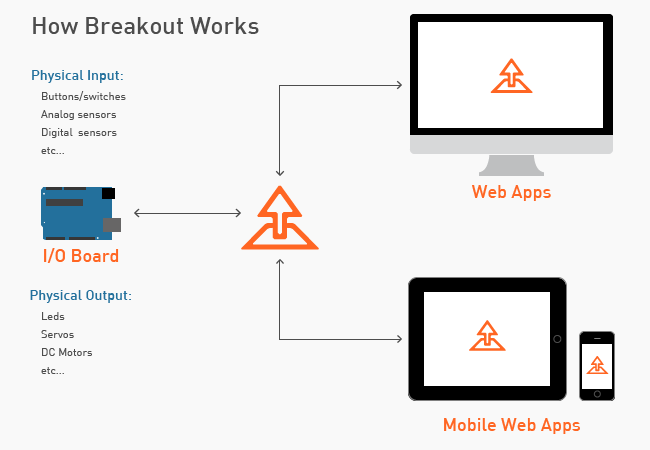
Breakout is a prototyping tool for exploring the intersection of the web and the physical world. The popular platform and the protocol are leveraged to enable users to access physical input and output purely from javascript. This makes it easy for anyone familiar with javascript and basic web development to explore the possibilities of using physical I/O in their web applications. Furthermore, the Breakout framework includes a growing library of hardware abstractions such as buttons, leds, servo motors, accelerometers, gyros, etc enabling the user to easily interface with a range of sensors and actuators using just a few lines of javascript code.
Breakout grew out of a need for a simple platform to enable designers to prototype functional web-based interfaces to the physical world. It is based largely on the toolkit and informed by the experiences of the developers of both Funnel and Breakout as designers, technologists and educators.